
Page 107 - Autonomous Mobile Robots
P. 107
90 Autonomous Mobile Robots
y
Predicted range (k)
x v
R (k+1|k) b(k)
2
Predicted range bin
D
(k+1|k)
x v
E A
F
Range bin 2 Predicted range b(k+1|k)
at 233° B
R (k+1|k)
1
C
Range bin 1 at 231°
x
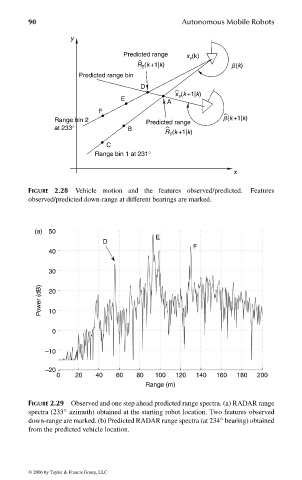
FIGURE 2.28 Vehicle motion and the features observed/predicted. Features
observed/predicted down-range at different bearings are marked.
(a) 50
E
D
F
40
30
Power (dB) 20
10
0
–10
–20
0 20 40 60 80 100 120 140 160 180 200
Range (m)
FIGURE 2.29 Observed and one step ahead predicted range spectra. (a) RADAR range
◦
spectra (233 azimuth) obtained at the starting robot location. Two features observed
◦
down-range are marked. (b) Predicted RADAR range spectra (at 234 bearing) obtained
from the predicted vehicle location.
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c002” — 2006/3/31 — 17:29 — page 90 — #50