
Page 179 - Autonomous Mobile Robots
P. 179
Landmarks and Triangulation in Navigation 163
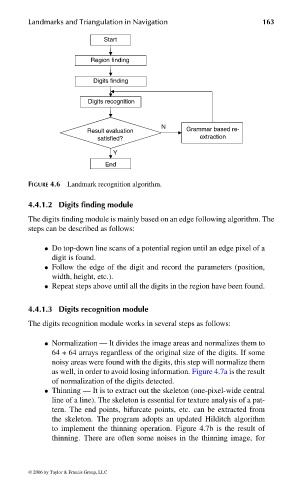
Start
Region finding
Digits finding
Digits recognition
N
Result evaluation Grammar based re-
satisfied? extraction
Y
End
FIGURE 4.6 Landmark recognition algorithm.
4.4.1.2 Digits finding module
The digits finding module is mainly based on an edge following algorithm. The
steps can be described as follows:
• Do top-down line scans of a potential region until an edge pixel of a
digit is found.
• Follow the edge of the digit and record the parameters (position,
width, height, etc.).
• Repeat steps above until all the digits in the region have been found.
4.4.1.3 Digits recognition module
The digits recognition module works in several steps as follows:
• Normalization — It divides the image areas and normalizes them to
64 ∗ 64 arrays regardless of the original size of the digits. If some
noisy areas were found with the digits, this step will normalize them
as well, in order to avoid losing information. Figure 4.7a is the result
of normalization of the digits detected.
• Thinning — It is to extract out the skeleton (one-pixel-wide central
line of a line). The skeleton is essential for texture analysis of a pat-
tern. The end points, bifurcate points, etc. can be extracted from
the skeleton. The program adopts an updated Hilditch algorithm
to implement the thinning operation. Figure 4.7b is the result of
thinning. There are often some noises in the thinning image, for
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c004” — 2006/3/31 — 16:42 — page 163 — #15