
Page 226 - Autonomous Mobile Robots
P. 226
Stabilization of Nonholonomic Systems 211
The kinematic model of a car with rear tires aligned with the car and front
tires allowed to spin about the vertical axis [7] is
˙ x = cos θv 1
˙ y = sin θv 1
(5.30)
1
˙ θ = tan θv 1
l
˙ φ = v 2
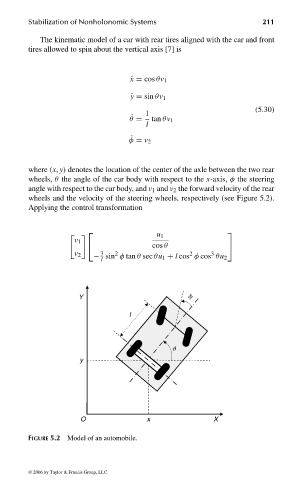
where (x, y) denotes the location of the center of the axle between the two rear
wheels, θ the angle of the car body with respect to the x-axis, φ the steering
angle with respect to the car body, and v 1 and v 2 the forward velocity of the rear
wheels and the velocity of the steering wheels, respectively (see Figure 5.2).
Applying the control transformation
u 1
v 1
cos θ
v 2 3 2 2 3
− sin φ tan θ sec θu 1 + l cos φ cos θu 2
l
Y f
l
u
y
O x X
FIGURE 5.2 Model of an automobile.
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c005” — 2006/3/31 — 16:42 — page 211 — #25