
Page 189 - Autonomous Mobile Robots
P. 189
Landmarks and Triangulation in Navigation 173
4.5 SICK LASER SCANNER AND GEOMETRIC LANDMARKS
Geometric landmarks are widely used for robot navigation, which are normally
static. Recently, Howard and his colleagues [25] proposed a new approach
by equipping their robots with geometric landmarks that are easily found and
movablewithintheenvironment. Intheirimplementation, alargeheterogeneous
team of robots was adopted, each of which carried a SICK scanner and two geo-
metric landmarks (cylinders). Motivated by their research, we have equipped
each of our robots with a SICK scanner and a cylinder so that colocalization
can be implemented.
Since indoor environments usually contain many straight lines, the detection
process is greatly aided if the landmark always has identical range signatures
regardless of relative position or orientation. This is the case for one shape only,
the circle. This characteristic aids detection but is not helpful when determin-
ing relative positions between two or more robots because rotational changes
cannot be perceived. Two distinguishable circles guarantee unique localization.
If the circles are indistinguishable then localization is one of the two places.
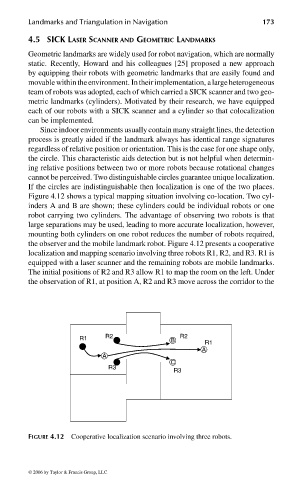
Figure 4.12 shows a typical mapping situation involving co-location. Two cyl-
inders A and B are shown; these cylinders could be individual robots or one
robot carrying two cylinders. The advantage of observing two robots is that
large separations may be used, leading to more accurate localization, however,
mounting both cylinders on one robot reduces the number of robots required,
the observer and the mobile landmark robot. Figure 4.12 presents a cooperative
localization and mapping scenario involving three robots R1, R2, and R3. R1 is
equipped with a laser scanner and the remaining robots are mobile landmarks.
The initial positions of R2 and R3 allow R1 to map the room on the left. Under
the observation of R1, at position A, R2 and R3 move across the corridor to the
R1 R2 B R2 R1
A
A
C
R3
R3
FIGURE 4.12 Cooperative localization scenario involving three robots.
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c004” — 2006/3/31 — 16:42 — page 173 — #25