
Page 23 - Bebop to The Boolean Boogie An Unconventional Guide to Electronics Fundamentals, Components, and Processes
P. 23
4 Chapterone
Assume that at time To the system is in its
stable state. The system remains in this state
until time T,, when an inquisitive passerby
grabs hold of the brick and pulls it down,
thereby increasing the tension on the elastic.
Wooden beam
Pulling the brick down takes some time, and
Elastic the brick reaches its lowest point at time T,.
The passerby hangs around for a while
.
Brick looking somewhat foolish, releases
\
\ the brick at time T,, and there-
Stable position
(tension in elastic balances pull of gravity) after exits from our story. fie
Figure 1-4. Brick suspended by elastic brick‘s resulting motion may
be illustrated using an analog
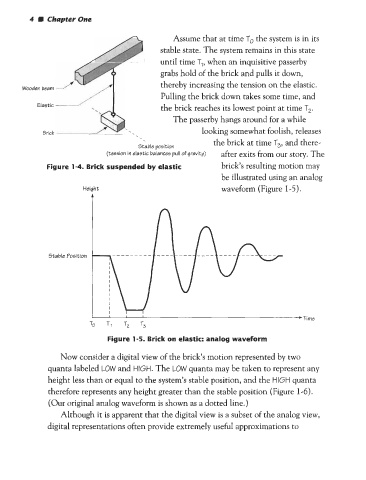
Height waveform (Figure 1-5).
4
Stable Position
-Time
Figure 1-5. Brick on elastic: analog waveform
Now consider a digital view of the brick’s motion represented by two
quanta labeled LOW and HIGH. The LOW quanta may be taken to represent any
height less than or equal to the system’s stable position, and the HIGH quanta
therefore represents any height greater than the stable position (Figure 1-6).
(Our original analog waveform is shown as a dotted line.)
Although it is apparent that the digital view is a subset of the analog view,
digital representations often provide extremely useful approximations to