
Page 199 - Biomimetics : Biologically Inspired Technologies
P. 199
Bar-Cohen : Biomimetics: Biologically Inspired Technologies DK3163_c006 Final Proof page 185 21.9.2005 2:56am
Robotic Mechanisms 185
Figure 6.5 A molecule robot developed in the Dartmouth Robotics Laboratory consists of four modules that can
locomote by using a ‘‘tumbling’’ gait.
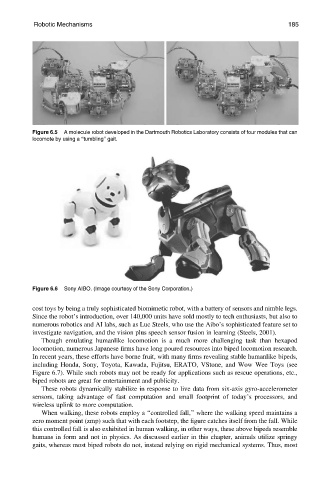
Figure 6.6 Sony AIBO. (Image courtesy of the Sony Corporation.)
cost toys by being a truly sophisticated biomimetic robot, with a battery of sensors and nimble legs.
Since the robot’s introduction, over 140,000 units have sold mostly to tech enthusiasts, but also to
numerous robotics and AI labs, such as Luc Steels, who use the Aibo’s sophisticated feature set to
investigate navigation, and the vision plus speech sensor fusion in learning (Steels, 2001).
Though emulating humanlike locomotion is a much more challenging task than hexapod
locomotion, numerous Japanese firms have long poured resources into biped locomotion research.
In recent years, these efforts have borne fruit, with many firms revealing stable humanlike bipeds,
including Honda, Sony, Toyota, Kawada, Fujitsu, ERATO, VStone, and Wow Wee Toys (see
Figure 6.7). While such robots may not be ready for applications such as rescue operations, etc.,
biped robots are great for entertainment and publicity.
These robots dynamically stabilize in response to live data from six-axis gyro-accelerometer
sensors, taking advantage of fast computation and small footprint of today’s processors, and
wireless uplink to more computation.
When walking, these robots employ a ‘‘controlled fall,’’ where the walking speed maintains a
zero moment point (zmp) such that with each footstep, the figure catches itself from the fall. While
this controlled fall is also exhibited in human walking, in other ways, these above bipeds resemble
humans in form and not in physics. As discussed earlier in this chapter, animals utilize springy
gaits, whereas most biped robots do not, instead relying on rigid mechanical systems. Thus, most