
Page 275 - Biomimetics : Biologically Inspired Technologies
P. 275
Bar-Cohen : Biomimetics: Biologically Inspired Technologies DK3163_c009 Final Proof page 261 21.9.2005 3:10am
Engineered Muscle Actuators 261
3
1 2
5
4
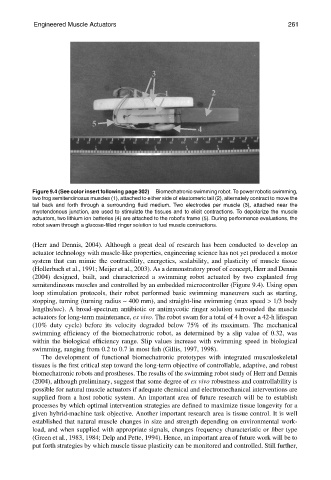
Figure 9.4 (See color insert following page 302) Biomechatronic swimming robot. To power robotic swimming,
two frog semitendinosus muscles (1), attached to either side of elastomeric tail (2), alternately contract to move the
tail back and forth through a surrounding fluid medium. Two electrodes per muscle (3), attached near the
myotendonous junction, are used to stimulate the tissues and to elicit contractions. To depolarize the muscle
actuators, two lithium ion batteries (4) are attached to the robot’s frame (5). During performance evaluations, the
robot swam through a glucose-filled ringer solution to fuel muscle contractions.
(Herr and Dennis, 2004). Although a great deal of research has been conducted to develop an
actuator technology with muscle-like properties, engineering science has not yet produced a motor
system that can mimic the contractility, energetics, scalability, and plasticity of muscle tissue
(Hollerbach et al., 1991; Meijer et al., 2003). As a demonstratory proof of concept, Herr and Dennis
(2004) designed, built, and characterized a swimming robot actuated by two explanted frog
semitendinosus muscles and controlled by an embedded microcontroller (Figure 9.4). Using open
loop stimulation protocols, their robot performed basic swimming maneuvers such as starting,
stopping, turning (turning radius ~ 400 mm), and straight-line swimming (max speed > 1/3 body
lengths/sec). A broad-spectrum antibiotic or antimycotic ringer solution surrounded the muscle
actuators for long-term maintenance, ex vivo. The robot swam for a total of 4 h over a 42-h lifespan
(10% duty cycle) before its velocity degraded below 75% of its maximum. The mechanical
swimming efficiency of the biomechatronic robot, as determined by a slip value of 0.32, was
within the biological efficiency range. Slip values increase with swimming speed in biological
swimming, ranging from 0.2 to 0.7 in most fish (Gillis, 1997, 1998).
The development of functional biomechatronic prototypes with integrated musculoskeletal
tissues is the first critical step toward the long-term objective of controllable, adaptive, and robust
biomechatronic robots and prostheses. The results of the swimming robot study of Herr and Dennis
(2004), although preliminary, suggest that some degree of ex vivo robustness and controllability is
possible for natural muscle actuators if adequate chemical and electromechanical interventions are
supplied from a host robotic system. An important area of future research will be to establish
processes by which optimal intervention strategies are defined to maximize tissue longevity for a
given hybrid-machine task objective. Another important research area is tissue control. It is well
established that natural muscle changes in size and strength depending on environmental work-
load, and when supplied with appropriate signals, changes frequency characteristic or fiber type
(Green et al., 1983, 1984; Delp and Pette, 1994). Hence, an important area of future work will be to
put forth strategies by which muscle tissue plasticity can be monitored and controlled. Still further,