
Page 68 - Build Your Own Combat Robot
P. 68
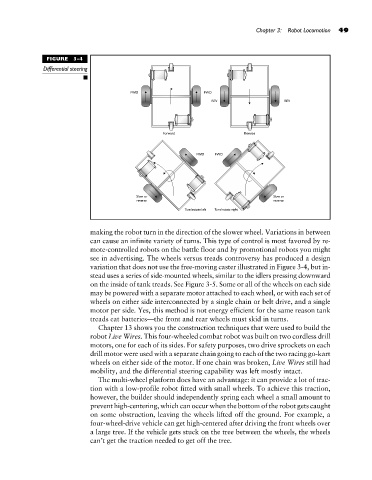
FIGURE 3-4 Chapter 3: Robot Locomotion 49
Differential steering
making the robot turn in the direction of the slower wheel. Variations in between
can cause an infinite variety of turns. This type of control is most favored by re-
mote-controlled robots on the battle floor and by promotional robots you might
see in advertising. The wheels versus treads controversy has produced a design
variation that does not use the free-moving caster illustrated in Figure 3-4, but in-
stead uses a series of side-mounted wheels, similar to the idlers pressing downward
on the inside of tank treads. See Figure 3-5. Some or all of the wheels on each side
may be powered with a separate motor attached to each wheel, or with each set of
wheels on either side interconnected by a single chain or belt drive, and a single
motor per side. Yes, this method is not energy efficient for the same reason tank
treads eat batteries—the front and rear wheels must skid in turns.
Chapter 13 shows you the construction techniques that were used to build the
robot Live Wires. This four-wheeled combat robot was built on two cordless drill
motors, one for each of its sides. For safety purposes, two drive sprockets on each
drill motor were used with a separate chain going to each of the two racing go-kart
wheels on either side of the motor. If one chain was broken, Live Wires still had
mobility, and the differential steering capability was left mostly intact.
The multi-wheel platform does have an advantage: it can provide a lot of trac-
tion with a low-profile robot fitted with small wheels. To achieve this traction,
however, the builder should independently spring each wheel a small amount to
prevent high-centering, which can occur when the bottom of the robot gets caught
on some obstruction, leaving the wheels lifted off the ground. For example, a
four-wheel-drive vehicle can get high-centered after driving the front wheels over
a large tree. If the vehicle gets stuck on the tree between the wheels, the wheels
can’t get the traction needed to get off the tree.