
Page 77 - Build Your Own Combat Robot
P. 77
Build Your Own Combat Robot
58
FIGURE 3-11
A passive wheel
arrangement
Getting the torque from the shaft to the wheel requires a high-strength hub con-
nection. You should consider using the largest shaft diameter that you can locate
and design into your robot. Not only will the larger shaft diameter withstand
damage from hazards and weapons much better than a smaller shaft, you will find
it easier to machine a slot, a “D” flat, pin holes, or key slots in the larger shaft (see
Figure 3-13). With the larger shaft diameter, you will require larger pillow block
bearings that will withstand much greater forces. So, larger is better in these cases
for greater strength.
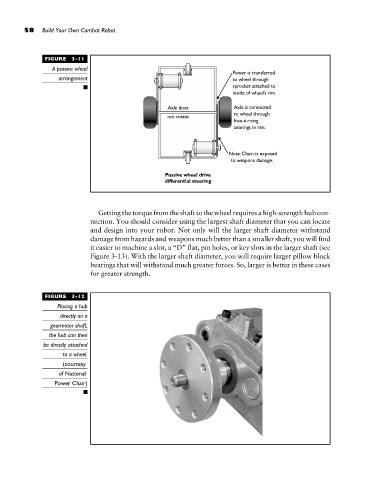
FIGURE 3-12
Placing a hub
directly on a
gearmotor shaft;
the hub can then
be directly attached
to a wheel.
(courtesy
of National
Power Chair)