
Page 169 - Build Your Own Quadcopter_ Power Up Your Designs with the Parallax Elev-8
P. 169
148 Bu il d Y o ur O w n Q u a d c o p t e r
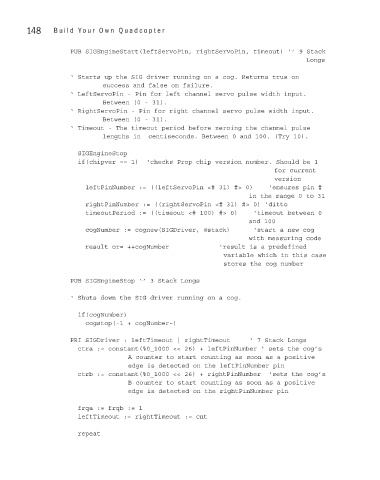
PUB SIGEngineStart(leftServoPin, rightServoPin, timeout) ‘’ 9 Stack
Longs
‘ Starts up the SIG driver running on a cog. Returns true on
success and false on failure.
‘ LeftServoPin - Pin for left channel servo pulse width input.
Between (0 - 31).
‘ RightServoPin - Pin for right channel servo pulse width input.
Between (0 - 31).
‘ Timeout - The timeout period before zeroing the channel pulse
lengths in centiseconds. Between 0 and 100. (Try 10).
SIGEngineStop
if(chipver == 1) ‘checks Prop chip version number. Should be 1
version
leftPinNumber := ((leftServoPin <# 31) #> 0) ‘ensures pin #
in the range 0 to 31
rightPinNumber := ((rightServoPin <# 31) #> 0) ‘ditto
timeoutPeriod := ((timeout <# 100) #> 0) ‘timeout between 0
and 100
cogNumber := cognew(SIGDriver, @stack) ‘start a new cog
with measuring code
result or= ++cogNumber ‘result is a predefined
variable which in this case
stores the cog number
PUB SIGEngineStop ‘’ 3 Stack Longs
‘ Shuts down the SIG driver running on a cog.
if(cogNumber)
cogstop(-1 + cogNumber~)
PRI SIGDriver : leftTimeout | rightTimeout ‘ 7 Stack Longs
ctra := constant(%0_1000 << 26) + leftPinNumber ‘ sets the cog’s
A counter to start counting as soon as a positive
edge is detected on the leftPinNumber pin
ctrb := constant(%0_1000 << 26) + rightPinNumber ‘sets the cog’s
B counter to start counting as soon as a positive
edge is detected on the rightPinNumber pin
frqa := frqb := 1
leftTimeout := rightTimeout := cnt
repeat