
Page 37 - Build Your Own Quadcopter_ Power Up Your Designs with the Parallax Elev-8
P. 37
16 Bu il d Y o ur O w n Q u a d c o p t e r
Figure 2.3 Quadcopter principal axes and respective rotational motions.
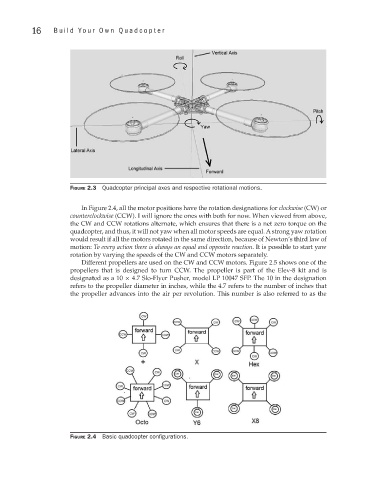
In Figure 2.4, all the motor positions have the rotation designations for clockwise (CW) or
counterclockwise (CCW). I will ignore the ones with both for now. When viewed from above,
the CW and CCW rotations alternate, which ensures that there is a net zero torque on the
quadcopter, and thus, it will not yaw when all motor speeds are equal. A strong yaw rotation
would result if all the motors rotated in the same direction, because of Newton’s third law of
motion: To every action there is always an equal and opposite reaction. It is possible to start yaw
rotation by varying the speeds of the CW and CCW motors separately.
Different propellers are used on the CW and CCW motors. Figure 2.5 shows one of the
propellers that is designed to turn CCW. The propeller is part of the Elev-8 kit and is
designated as a 10 × 4.7 Slo-Flyer Pusher, model LP 10047 SFP. The 10 in the designation
refers to the propeller diameter in inches, while the 4.7 refers to the number of inches that
the propeller advances into the air per revolution. This number is also referred to as the
Figure 2.4 Basic quadcopter configurations.