
Page 19 - Classification Parameter Estimation & State Estimation An Engg Approach Using MATLAB
P. 19
8 INTRODUCTION
classification and estimation problems. Techniques for statistical infer-
ence can also be shared. Of course, there are also differences between the
three subjects. For instance, the modelling of dynamic systems, usually
called system identification, involves aspects that are typical for dynamic
systems (i.e. determination of the order of the system, finding an appro-
priate functional structure of the model). However, when it finally
comes to finding the right parameters of the dynamic model, the tech-
niques from parameter estimation apply again.
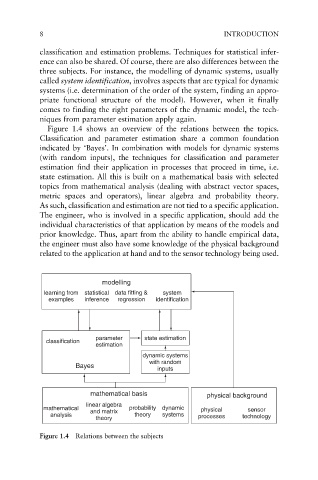
Figure 1.4 shows an overview of the relations between the topics.
Classification and parameter estimation share a common foundation
indicated by ‘Bayes’. In combination with models for dynamic systems
(with random inputs), the techniques for classification and parameter
estimation find their application in processes that proceed in time, i.e.
state estimation. All this is built on a mathematical basis with selected
topics from mathematical analysis (dealing with abstract vector spaces,
metric spaces and operators), linear algebra and probability theory.
As such, classification and estimation are not tied to a specific application.
The engineer, who is involved in a specific application, should add the
individual characteristics of that application by means of the models and
prior knowledge. Thus, apart from the ability to handle empirical data,
the engineer must also have some knowledge of the physical background
related to the application at hand and to the sensor technology being used.
modelling
learning from statistical data fitting & system
examples inference regression identification
parameter state estimation
classification
estimation
dynamic systems
with random
Bayes
inputs
mathematical basis physical background
linear algebra
mathematical and matrix probability dynamic physical sensor
analysis theory systems processes technology
theory
Figure 1.4 Relations between the subjects