
Page 230 - Concise Encyclopedia of Robotics
P. 230
Odometry
in Fig. 1. The displacement changes at a rate that depends on the speed.
As long as you move forward, the displacement increases. If you go back-
ward, the displacement decreases. Displacement can be either positive or
negative with respect to the starting point.
In two dimensions, say in a room or over the surface of Earth,
odometry is done by keeping constant track of velocity, which has com-
ponents of both speed and direction.
Imagine boating in the open sea, starting from an island.You know the
latitude and longitude of the island; you can measure your speed and direc-
tion constantly.You have a computer keep track of your speed and direction
from moment to moment. Then, after any length of time, the computer
can figure out where you are, based on past movements. It does this by
integrating both components of velocity (speed and direction) simulta-
neously over time. Sailors know this as ded reckoning (short for deductive
reckoning) of position.
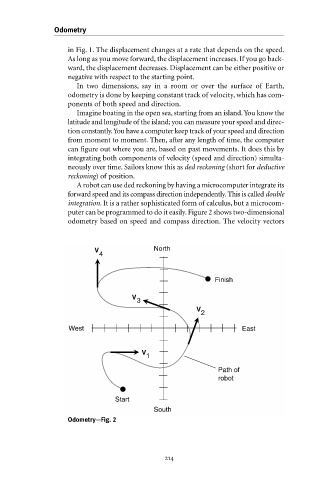
A robot can use ded reckoning by having a microcomputer integrate its
forward speed and its compass direction independently.This is called double
integration. It is a rather sophisticated form of calculus, but a microcom-
puter can be programmed to do it easily. Figure 2 shows two-dimensional
odometry based on speed and compass direction. The velocity vectors
V North
4
Finish
V
3
V
2
West East
V
1
Path of
robot
Start
South
Odometry—Fig. 2
