
Page 282 - Concise Encyclopedia of Robotics
P. 282
Revolute Geometry
Reverse engineering, when done legally, is important in the evolution
of new and improved robotic systems. In research and development, it
can be a valuable technique in hardware design, programming, and the
development of operating systems for robot controllers.
REVOLUTE GEOMETRY
Industrial robot arms can move in various different ways, depending on
their intended use. One mode of movement is known as revolute geometry.
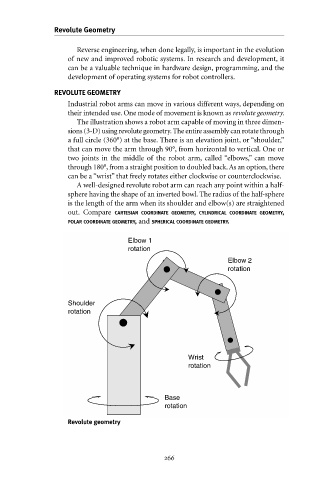
The illustration shows a robot arm capable of moving in three dimen-
sions (3-D) using revolute geometry.The entire assembly can rotate through
a full circle (360°) at the base. There is an elevation joint, or “shoulder,”
that can move the arm through 90°, from horizontal to vertical. One or
two joints in the middle of the robot arm, called “elbows,” can move
through 180°, from a straight position to doubled back.As an option, there
can be a “wrist” that freely rotates either clockwise or counterclockwise.
A well-designed revolute robot arm can reach any point within a half-
sphere having the shape of an inverted bowl. The radius of the half-sphere
is the length of the arm when its shoulder and elbow(s) are straightened
out. Compare CARTESIAN COORDINATE GEOMETRY, CYLINDRICAL COORDINATE GEOMETRY,
POLAR COORDINATE GEOMETRY, and SPHERICAL COORDINATE GEOMETRY.
Elbow 1
rotation
Elbow 2
rotation
Shoulder
rotation
Wrist
rotation
Base
rotation
Revolute geometry
