
Page 309 - Concise Encyclopedia of Robotics
P. 309
Speech Recognition
• The edge dimension of the smallest cubical parcel of space the robot
can define
In general, the smaller the spatial-resolution number, the greater is the
accuracy with which the robot can position its end effector(s) or move to a
specific location,and the smaller the error that can be sensed and corrected.
The spatial resolution of a robotic system depends on the resolution of the
controller. As the resolution increases, so does the required amount of
memory and processing power. In servomechanisms, the spatial resolution
depends on the smallest displacement the device can detect.
See also DISTANCE RESOLUTION, DIRECTION RESOLUTION, and RESOLUTION.
SPEECH RECOGNITION
The human voice consists of audio-frequency (AF) energy, with compo-
nents ranging from about 100 Hz to several kilohertz (kHz).(A frequency of
1 Hz is one cycle per second; 1 kHz = 1000 Hz.) This has been known ever
since Alexander Graham Bell sent the first voice signals over electric wires.
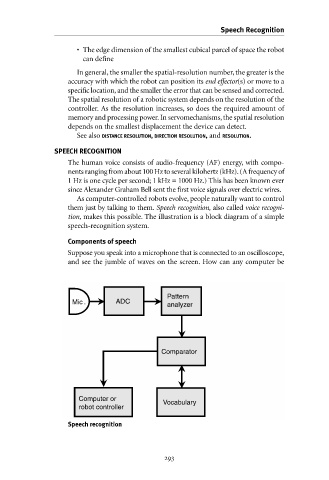
As computer-controlled robots evolve, people naturally want to control
them just by talking to them. Speech recognition, also called voice recogni-
tion, makes this possible. The illustration is a block diagram of a simple
speech-recognition system.
Components of speech
Suppose you speak into a microphone that is connected to an oscilloscope,
and see the jumble of waves on the screen. How can any computer be
Pattern
Mic . ADC analyzer
Comparator
Computer or Vocabulary
robot controller
Speech recognition
