
Page 159 - Control Theory in Biomedical Engineering
P. 159
Modeling simple and complex handwriting based on EMG signals 143
(
Þ ¼ A e XkðÞ + BU kðÞ + KY e Y
e Xk +1ð
(8)
e YkðÞ ¼ C e XkðÞ
(
Xk +1Þ ¼ AXkðÞ + BU kðÞ + Ke norm k ðÞ
ð
e
e
YkðÞ ¼ CXkðÞ
e
e
(9)
ekðÞ
e norm k ðÞ ¼ X ,ekðÞ ¼ YkðÞ e YkðÞ
ek ðÞ
with:
e X: state vector,
e Y: output vector,
e: error between real and estimated outputs,
e norm : normalized error,
A: state matrix,
B: input matrix,
C: output matrix,
K: observer gain.
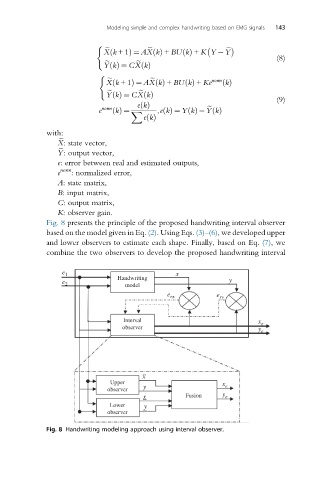
Fig. 8 presents the principle of the proposed handwriting interval observer
based on the model given in Eq. (2). Using Eqs. (3)–(6), we developed upper
and lower observers to estimate each shape. Finally, based on Eq. (7),we
combine the two observers to develop the proposed handwriting interval
e
1 x
e 2 Handwriting y
model
e rx e ry
Interval x e
observer y e
x
Upper x
observer y e
x Fusion y e
Lower y
observer
Fig. 8 Handwriting modeling approach using interval observer.