
Page 29 - Control Theory in Biomedical Engineering
P. 29
0.8
0.78
0.76 x
0.74
0.72
0.7
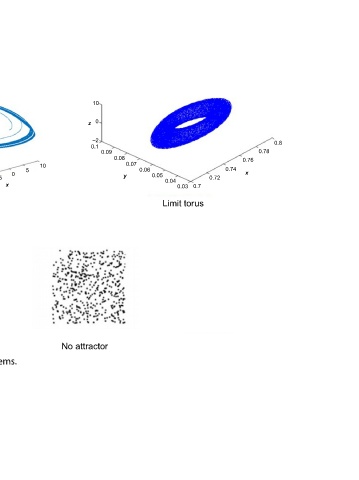
0.03 Limit torus
0.04
0.05
0.06
0.07
0.08 y
0.09
No attractor
10 0 –2 0.1
z
10
5
0
x
–5 systems.
–10
–15 Limit cycle
0
5 physiological
10 y 20
15 10 by
10 5 0 –5 –10 –15 20
z 0 x exhibit
–10
–20
4 Strange attractor behaviors
–10
2
0
0 y
x
–2 10 dynamic
Fixed point z
–4 10 5 0 –5 –10 –15 20
–6
0 possible
5
Five
y
10
7
6 4 2 0 –2 –4 15
z Fig.