
Page 214 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 214
Instilling Pain, Fear and Confidence
more accurately. Even so, the very simple methods just discussed bring a great reward
in system performance.
Danger objects and force fields
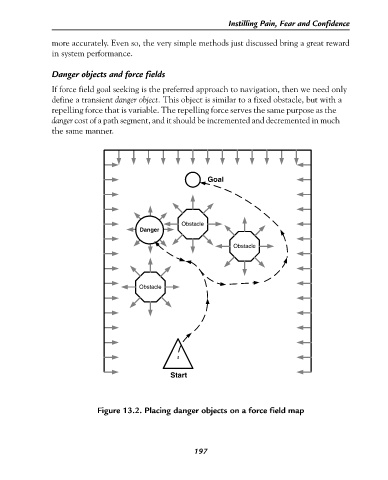
If force field goal seeking is the preferred approach to navigation, then we need only
define a transient danger object. This object is similar to a fixed obstacle, but with a
repelling force that is variable. The repelling force serves the same purpose as the
danger cost of a path segment, and it should be incremented and decremented in much
the same manner.
Goal
Obstacle
Danger
Obstacle
Obstacle
Start
Figure 13.2. Placing danger objects on a force field map
197