
Page 76 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 76
Closed Loop Controls, Rabbits and Hounds
controller. Since some of the terms of a PID do not work optimally in motor con-
trols, we will consider the classical examples of PIDs in temperature control, and
then work our way toward a configuration more capable of driving motors.
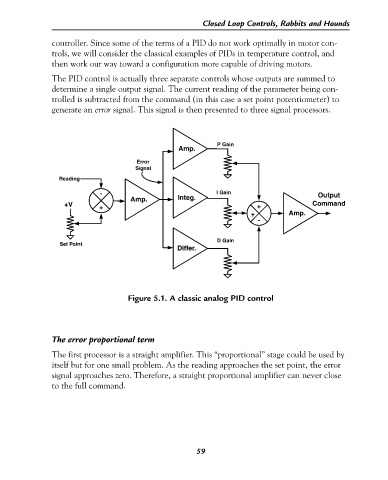
The PID control is actually three separate controls whose outputs are summed to
determine a single output signal. The current reading of the parameter being con-
trolled is subtracted from the command (in this case a set point potentiometer) to
generate an error signal. This signal is then presented to three signal processors.
P Gain
Amp.
Error
Signal
Reading
- I Gain Output
Amp. Integ.
+V + Command
+
+ Amp.
-
D Gain
Set Point
Differ.
Figure 5.1. A classic analog PID control
The error proportional term
The first processor is a straight amplifier. This “proportional” stage could be used by
itself but for one small problem. As the reading approaches the set point, the error
signal approaches zero. Therefore, a straight proportional amplifier can never close
to the full command.
59