
Page 319 - Dynamics and Control of Nuclear Reactors
P. 319
322 APPENDIX G Matlab and Simulink: A brief tutorial
G.4 Simulation of a closed-loop system
with P-I controller
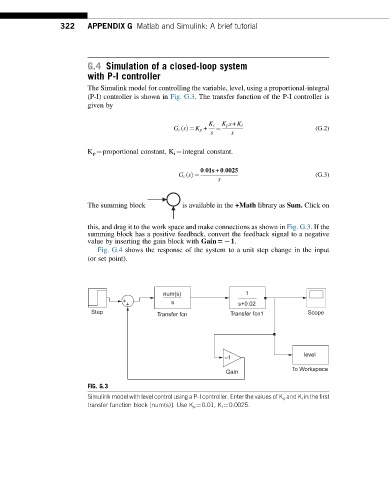
The Simulink model for controlling the variable, level, using a proportional-integral
(P-I) controller is shown in Fig. G.3. The transfer function of the P-I controller is
given by
K i K p s + K i
G c sðÞ ¼ K p + ¼ (G.2)
s s
K p ¼proportional constant, K i ¼integral constant.
0:01s + 0:0025
G c sðÞ ¼ (G.3)
s
The summing block is available in the +Math library as Sum. Click on
this, and drag it to the work space and make connections as shown in Fig. G.3. If the
summing block has a positive feedback, convert the feedback signal to a negative
value by inserting the gain block with Gain521.
Fig. G.4 shows the response of the system to a unit step change in the input
(or set point).
num(s) 1
+ s
+ s+0.02
Step Transfer fcn Transfer fcn1 Scope
level
–1
To Workspace
Gain
FIG. G.3
Simulink model with level control using a P-I controller. Enter the values of K p and K i in the first
transfer function block [num(s)]. Use K p ¼0.01, K i ¼0.0025.