
Page 199 - Dynamics of Mechanical Systems
P. 199
0593_C06_fm Page 180 Monday, May 6, 2002 2:28 PM
180 Dynamics of Mechanical Systems
k
1
F k F
2
FIGURE 6.7.5 + δ
Two springs in parallel.
Therefore, by combining Eqs. (6.7.8) and (6.7.9), we obtain:
F = k + δ k + )δ (6.7.10)
δ
k
k
1 2 = ( 1 2
where the sum k + k is now the equivalent spring modulus.
2
1
Observe that Eq. (6.7.10) may be expanded to include any number of springs in parallel,
and that the expression is also valid for springs in compression. Finally, observe that Eqs.
(6.7.6) and (6.7.10) are also applicable with torsion springs.
6.7.3 Contact Forces
Contact forces are generally more difficult to model than gravity and spring forces. That
is, it is usually more difficult to find equivalent force systems for contact forces. For many
physical systems of practical importance, however, it is possible to represent the contact
forces by a single force passing through a point of contact, defined as that point where the
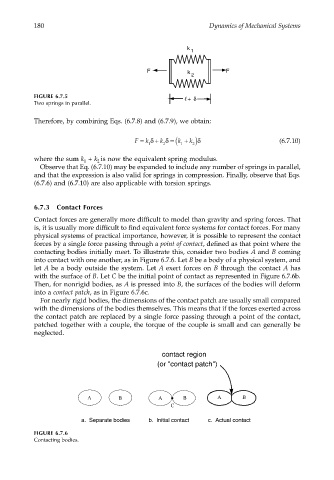
contacting bodies initially meet. To illustrate this, consider two bodies A and B coming
into contact with one another, as in Figure 6.7.6. Let B be a body of a physical system, and
let A be a body outside the system. Let A exert forces on B through the contact A has
with the surface of B. Let C be the initial point of contact as represented in Figure 6.7.6b.
Then, for nonrigid bodies, as A is pressed into B, the surfaces of the bodies will deform
into a contact patch, as in Figure 6.7.6c.
For nearly rigid bodies, the dimensions of the contact patch are usually small compared
with the dimensions of the bodies themselves. This means that if the forces exerted across
the contact patch are replaced by a single force passing through a point of the contact,
patched together with a couple, the torque of the couple is small and can generally be
neglected.
contact region
(or "contact patch")
A B A B A B
C
a. Separate bodies b. Initial contact c. Actual contact
FIGURE 6.7.6
Contacting bodies.