
Page 169 - Flexible Robotics in Medicine
P. 169
Handheld flexible robot with concentric tubes aiming for intraocular procedures 155
unlike the aforementioned devices, where the rotary actuator rode on the translation axis,
here, a gear train is used to rotate the tube from a distance. The result is a neat solution,
which allows for easy changing of the tube [22].
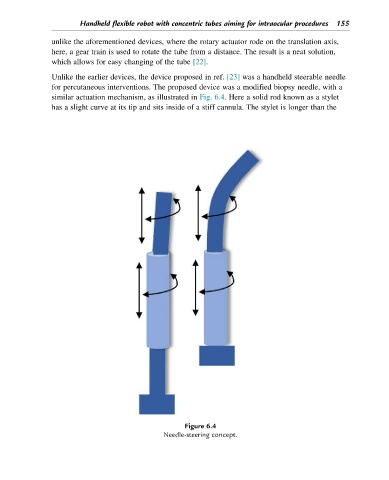
Unlike the earlier devices, the device proposed in ref. [23] was a handheld steerable needle
for percutaneous interventions. The proposed device was a modified biopsy needle, with a
similar actuation mechanism, as illustrated in Fig. 6.4. Here a solid rod known as a stylet
has a slight curve at its tip and sits inside of a stiff cannula. The stylet is longer than the
Figure 6.4
Needle-steering concept.