
Page 184 - Flexible Robotics in Medicine
P. 184
Tendon routing and anchoring for cableriven single-t surgical manipulators 171
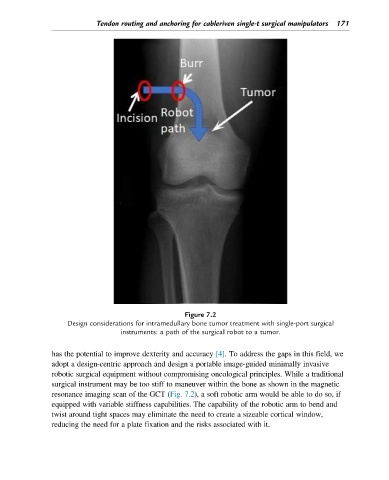
Figure 7.2
Design considerations for intramedullary bone tumor treatment with single-port surgical
instruments: a path of the surgical robot to a tumor.
has the potential to improve dexterity and accuracy [4]. To address the gaps in this field, we
adopt a design-centric approach and design a portable image-guided minimally invasive
robotic surgical equipment without compromising oncological principles. While a traditional
surgical instrument may be too stiff to maneuver within the bone as shown in the magnetic
resonance imaging scan of the GCT (Fig. 7.2), a soft robotic arm would be able to do so, if
equipped with variable stiffness capabilities. The capability of the robotic arm to bend and
twist around tight spaces may eliminate the need to create a sizeable cortical window,
reducing the need for a plate fixation and the risks associated with it.