
Page 412 - Flexible Robotics in Medicine
P. 412
406 Chapter 18
Table 18.1: Selected materials for components.
Component Material Reason
Forceps Stainless steel (316L) Biocompatible, rigid, and resistant to wear
Connector beads Stainless steel (316L) Biocompatible and rigid
Spring Stainless steel (316L) Biocompatible and rigid
Gooseneck Stainless steel (316L) Biocompatible, able to withstand tension during withdrawal
Cables Nylon (316L) Small diameter, able to be threaded through connector
beads, able to transmit forces
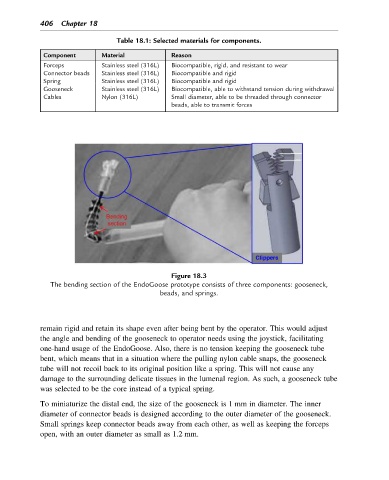
Figure 18.3
The bending section of the EndoGoose prototype consists of three components: gooseneck,
beads, and springs.
remain rigid and retain its shape even after being bent by the operator. This would adjust
the angle and bending of the gooseneck to operator needs using the joystick, facilitating
one-hand usage of the EndoGoose. Also, there is no tension keeping the gooseneck tube
bent, which means that in a situation where the pulling nylon cable snaps, the gooseneck
tube will not recoil back to its original position like a spring. This will not cause any
damage to the surrounding delicate tissues in the lumenal region. As such, a gooseneck tube
was selected to be the core instead of a typical spring.
To miniaturize the distal end, the size of the gooseneck is 1 mm in diameter. The inner
diameter of connector beads is designed according to the outer diameter of the gooseneck.
Small springs keep connector beads away from each other, as well as keeping the forceps
open, with an outer diameter as small as 1.2 mm.