
Page 414 - Flexible Robotics in Medicine
P. 414
408 Chapter 18
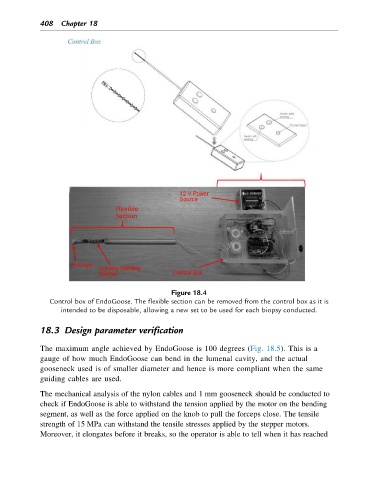
Figure 18.4
Control box of EndoGoose. The flexible section can be removed from the control box as it is
intended to be disposable, allowing a new set to be used for each biopsy conducted.
18.3 Design parameter verification
The maximum angle achieved by EndoGoose is 100 degrees (Fig. 18.5). This is a
gauge of how much EndoGoose can bend in the lumenal cavity, and the actual
gooseneck used is of smaller diameter and hence is more compliant when the same
guiding cables are used.
The mechanical analysis of the nylon cables and 1 mm gooseneck should be conducted to
check if EndoGoose is able to withstand the tension applied by the motor on the bending
segment, as well as the force applied on the knob to pull the forceps close. The tensile
strength of 15 MPa can withstand the tensile stresses applied by the stepper motors.
Moreover, it elongates before it breaks, so the operator is able to tell when it has reached