
Page 283 - T. Anderson-Fracture Mechanics - Fundamentals and Applns.-CRC (2005)
P. 283
1656_C006.fm Page 263 Monday, May 23, 2005 5:50 PM
Fracture Mechanisms in Nonmetals 263
Equation (6.5), which is known as the WLF relationship, typically is valid in the range T < T <
g
T + 100°C. Readers familiar with creep in metals may recognize an analogy with the Larson-
g
Miller parameter [8], which assumes a time-temperature equivalence for creep rupture.
6.1.1.5 Mechanical Analogs
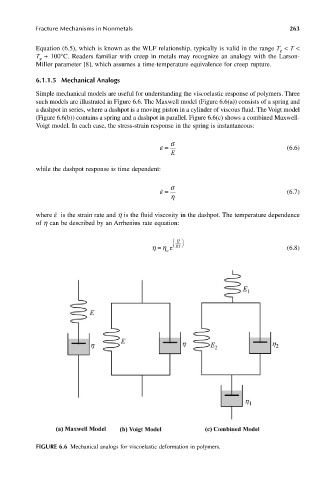
Simple mechanical models are useful for understanding the viscoelastic response of polymers. Three
such models are illustrated in Figure 6.6. The Maxwell model (Figure 6.6(a)) consists of a spring and
a dashpot in series, where a dashpot is a moving piston in a cylinder of viscous fluid. The Voigt model
(Figure 6.6(b)) contains a spring and a dashpot in parallel. Figure 6.6(c) shows a combined Maxwell-
Voigt model. In each case, the stress-strain response in the spring is instantaneous:
σ
ε = (6.6)
E
while the dashpot response is time dependent:
σ
˙ ε = (6.7)
η
where ˙ ε is the strain rate and η is the fluid viscosity in the dashpot. The temperature dependence
of η can be described by an Arrhenius rate equation:
Q
=
ηη e RT (6.8)
o
FIGURE 6.6 Mechanical analogs for viscoelastic deformation in polymers.