
Page 253 - Handbook of Biomechatronics
P. 253
Lower-Limb Prosthetics
y NO-KF (t)
y TRUNK (t)
support
Single
y KF (t)
support
Double
0
10
–10
–20
40
50
60
20
30
70
Vertical displacement (mm)
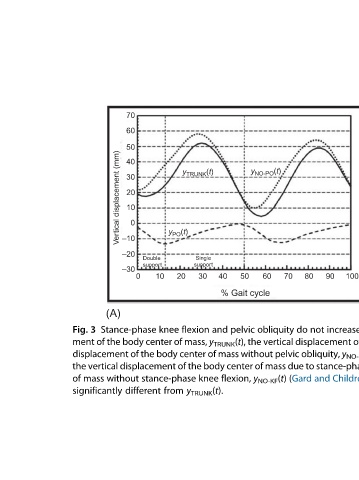
100 –30 0 100 90 80 70 60 50 40 30 20 10 % Gait cycle (B) displace- vertical The (A) shift. phase a introduce BCOM—they vertical increase ment of the body center of mass, y TRUNK (t), the vertical displacement of the body center of mass due to pelvic obliquity, y PO (t),
90
not and
80
do
70 y NO-KF (t)(Gard
y NO-PO (t) 60 obliquity
50 % Gait cycle pelvic flexion,
40 and
y TRUNK (t) Single support 30 flexion knee y TRUNK (t).
y PO (t) 20 knee stance-phase from
Double support 10 different
70 60 50 40 30 20 10 0 –10 –20 –30 0 Stance-phase without
(A)
Vertical displacement (mm)
3 mass significantly
Fig. of