
Page 518 - Handbook of Biomechatronics
P. 518
512
of
models
mathematical
needed.
are
Observers
when
out
under-actuated.
effects
nonlinear
called
filter
is
system
and
is, system), (actuation transfer power with (end-effector) micro-swimmer data multiplexed of set a contain could signal control the that noted is It Ahmet Fatih Tabak
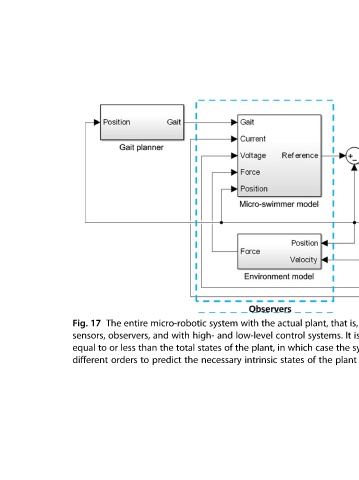
that the plant
plant, systems. case the of
actual control which in states
the plant, intrinsic
with low-level the
system and high- of states necessary
micro-robotic with and total the the predict
entire observers, than less to orders
The or
17 sensors, to different
Fig. equal