
Page 162 - Human Inspired Dexterity in Robotic Manipulation
P. 162
Dynamic Manipulation Based on Thumb Opposability 159
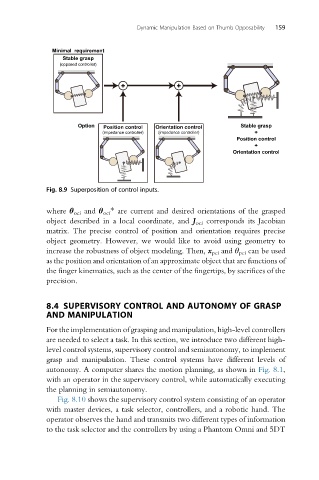
Minimal requirement
Stable grasp
(opposed controller)
+ +
Option Position control Orientation control Stable grasp
(impedance controller) (impedance controller) +
Position control
+
Orientation control
Fig. 8.9 Superposition of control inputs.
where θ oci and θ oci * are current and desired orientations of the grasped
object described in a local coordinate, and J oci corresponds its Jacobian
matrix. The precise control of position and orientation requires precise
object geometry. However, we would like to avoid using geometry to
increase the robustness of object modeling. Then, x pci and θ pci can be used
as the position and orientation of an approximate object that are functions of
the finger kinematics, such as the center of the fingertips, by sacrifices of the
precision.
8.4 SUPERVISORY CONTROL AND AUTONOMY OF GRASP
AND MANIPULATION
For the implementation of grasping and manipulation, high-level controllers
are needed to select a task. In this section, we introduce two different high-
level control systems, supervisory control and semiautonomy, to implement
grasp and manipulation. These control systems have different levels of
autonomy. A computer shares the motion planning, as shown in Fig. 8.1,
with an operator in the supervisory control, while automatically executing
the planning in semiautonomy.
Fig. 8.10 shows the supervisory control system consisting of an operator
with master devices, a task selector, controllers, and a robotic hand. The
operator observes the hand and transmits two different types of information
to the task selector and the controllers by using a Phantom Omni and 5DT