
Page 62 - Human Inspired Dexterity in Robotic Manipulation
P. 62
58 Human Inspired Dexterity in Robotic Manipulation
than that required for effective task-completion time in tele-manipulation
(generally over 500 ms to several seconds is considered acceptable).
4.4 MULTISENSORY ILLUSION ON MASTER-SLAVE SYSTEM
Based on the results of the previous section, preliminary studies are ongoing
in the development of a surgical MSS. To effectively elicit the multisensory
illusion, we considered optimal hand-eye coordination, minimum time
delay, and minimum mechanical constraints to the user.
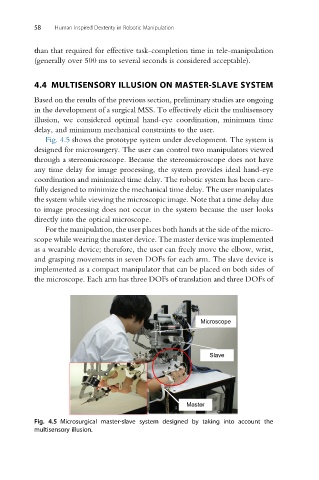
Fig. 4.5 shows the prototype system under development. The system is
designed for microsurgery. The user can control two manipulators viewed
through a stereomicroscope. Because the stereomicroscope does not have
any time delay for image processing, the system provides ideal hand-eye
coordination and minimized time delay. The robotic system has been care-
fully designed to minimize the mechanical time delay. The user manipulates
the system while viewing the microscopic image. Note that a time delay due
to image processing does not occur in the system because the user looks
directly into the optical microscope.
For the manipulation, the user places both hands at the side of the micro-
scope while wearing the master device. The master device was implemented
as a wearable device; therefore, the user can freely move the elbow, wrist,
and grasping movements in seven DOFs for each arm. The slave device is
implemented as a compact manipulator that can be placed on both sides of
the microscope. Each arm has three DOFs of translation and three DOFs of
Microscope
Slave
Master
Fig. 4.5 Microsurgical master-slave system designed by taking into account the
multisensory illusion.