
Page 58 - Human Inspired Dexterity in Robotic Manipulation
P. 58
54 Human Inspired Dexterity in Robotic Manipulation
Furthermore, user-friendliness and comfort are increasing in demand in
the control of robotic systems, because robotic systems are no longer oper-
ated by only engineering experts, but by a wider range of users.
This chapter describes a method to further investigate the system perfor-
mance of the tele-manipulation system, not only by engineering measures,
but also by the psychological aspect.
4.2 MULTISENSORY INTEGRATION AND ILLUSION
Multisensory integration involves studying how sensory information such as
visual, auditory, haptic, olfactory, and kinesthetic sensations are integrated in
the human nervous system [6]. Multisensory illusions trick the nervous sys-
tem with multisensory stimulation. Well-known examples of multisensory
illusion include the McGurk effect [7], Double-flash illusion [8], and
Ventriloquism [9]. This chapter focuses on multisensory illusions involving
self-motion.
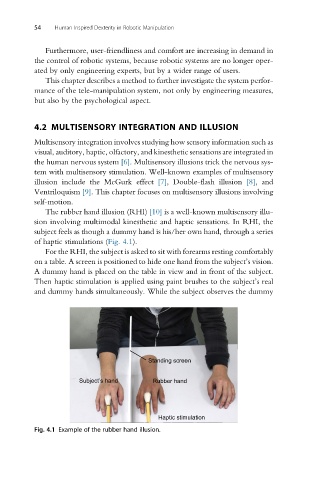
The rubber hand illusion (RHI) [10] is a well-known multisensory illu-
sion involving multimodal kinesthetic and haptic sensations. In RHI, the
subject feels as though a dummy hand is his/her own hand, through a series
of haptic stimulations (Fig. 4.1).
For the RHI, the subject is asked to sit with forearms resting comfortably
on a table. A screen is positioned to hide one hand from the subject’s vision.
A dummy hand is placed on the table in view and in front of the subject.
Then haptic stimulation is applied using paint brushes to the subject’s real
and dummy hands simultaneously. While the subject observes the dummy
Standing screen
Subject’s hand Rubber hand
Haptic stimulation
Fig. 4.1 Example of the rubber hand illusion.