
Page 202 - Intelligent Communication Systems
P. 202
I 72 INTELLIGENT COMMUNICATION SYSTEMS
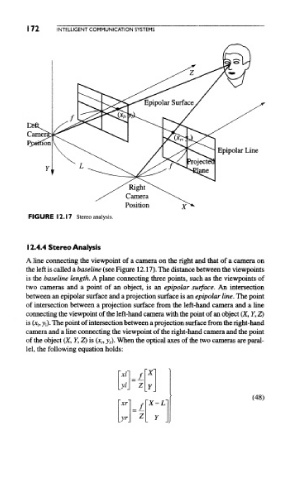
FIGURE 12.17 Stereo analysis.
12.4.4 Stereo Analysis
A line connecting the viewpoint of a camera on the right and that of a camera on
the left is called a baseline (see Figure 12.17). The distance between the viewpoints
is the baseline length. A plane connecting three points, such as the viewpoints of
two cameras and a point of an object, is an epipolar surface. An intersection
between an epipolar surface and a projection surface is an epipolar line. The point
of intersection between a projection surface from the left-hand camera and a line
connecting the viewpoint of the left-hand camera with the point of an object (X, Y, Z)
is (% y,). The point of intersection between a projection surface from the right-hand
camera and a line connecting the viewpoint of the right-hand camera and the point
of the object (X, Y, Z) is (x r, y r). When the optical axes of the two cameras are paral-
lel, the following equation holds: