
Page 113 - Introduction to AI Robotics
P. 113
96
3 Biological Foundations of the Reactive Paradigm
fly1
activation
condition
motor schema perceptual schema
snap locate_fly
behavior
percept,
gain
motor SI perceptual SI
snap(fly1) locate_fly(fly1)
(x,y,z),
100%
action,
intensity
snap at (x,y,z)
with all strength
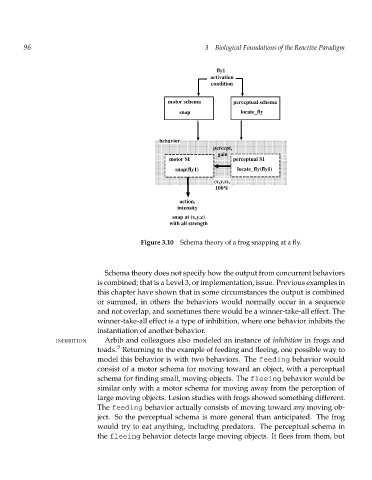
Figure 3.10 Schema theory of a frog snapping at a fly.
Schema theory does not specify how the output from concurrent behaviors
is combined; that is a Level 3, or implementation, issue. Previous examples in
this chapter have shown that in some circumstances the output is combined
or summed, in others the behaviors would normally occur in a sequence
and not overlap, and sometimes there would be a winner-take-all effect. The
winner-take-all effect is a type of inhibition, where one behavior inhibits the
instantiation of another behavior.
INHIBITION Arbib and colleagues also modeled an instance of inhibition in frogs and
7
toads. Returning to the example of feeding and fleeing, one possible way to
model this behavior is with two behaviors. The feeding behavior would
consist of a motor schema for moving toward an object, with a perceptual
schema for finding small, moving objects. The fleeing behavior would be
similar only with a motor schema for moving away from the perception of
large moving objects. Lesion studies with frogs showed something different.
The feeding behavior actually consists of moving toward any moving ob-
ject. So the perceptual schema is more general than anticipated. The frog
would try to eat anything, including predators. The perceptual schema in
the fleeing behavior detects large moving objects. It flees from them, but