
Page 161 - Introduction to AI Robotics
P. 161
144
4 The Reactive Paradigm
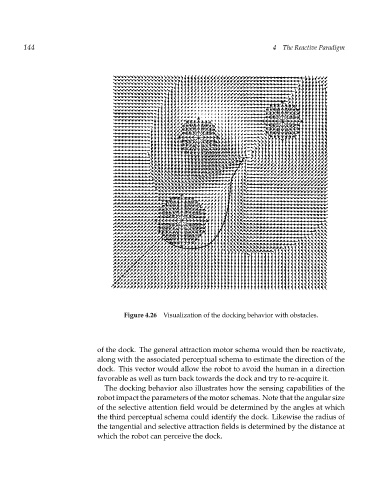
Figure 4.26 Visualization of the docking behavior with obstacles.
of the dock. The general attraction motor schema would then be reactivate,
along with the associated perceptual schema to estimate the direction of the
dock. This vector would allow the robot to avoid the human in a direction
favorable as well as turn back towards the dock and try to re-acquire it.
The docking behavior also illustrates how the sensing capabilities of the
robot impact the parameters of the motor schemas. Note that the angular size
of the selective attention field would be determined by the angles at which
the third perceptual schema could identify the dock. Likewise the radius of
the tangential and selective attraction fields is determined by the distance at
which the robot can perceive the dock.