
Page 163 - Introduction to AI Robotics
P. 163
146
4 The Reactive Paradigm
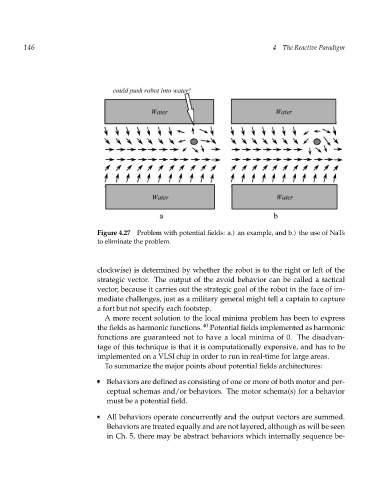
Figure 4.27 Problem with potential fields: a.) an example, and b.) the use of NaTs
to eliminate the problem.
clockwise) is determined by whether the robot is to the right or left of the
strategic vector. The output of the avoid behavior can be called a tactical
vector, because it carries out the strategic goal of the robot in the face of im-
mediate challenges, just as a military general might tell a captain to capture
a fort but not specify each footstep.
A more recent solution to the local minima problem has been to express
the fields as harmonic functions. 40 Potential fields implemented as harmonic
functions are guaranteed not to have a local minima of 0. The disadvan-
tage of this technique is that it is computationally expensive, and has to be
implemented on a VLSI chip in order to run in real-time for large areas.
To summarize the major points about potential fields architectures:
Behaviors are defined as consisting of one or more of both motor and per-
ceptual schemas and/or behaviors. The motor schema(s) for a behavior
must be a potential field.
All behaviors operate concurrently and the output vectors are summed.
Behaviors are treated equally and are not layered, although as will be seen
in Ch. 5, there may be abstract behaviors which internally sequence be-