
Page 189 - Introduction to AI Robotics
P. 189
172
sonar 5 Designing a Reactive Implementation
yes
distraction?
no
vision shaft encoders
follow−line move−ahead
behavior behavior
steering actuator
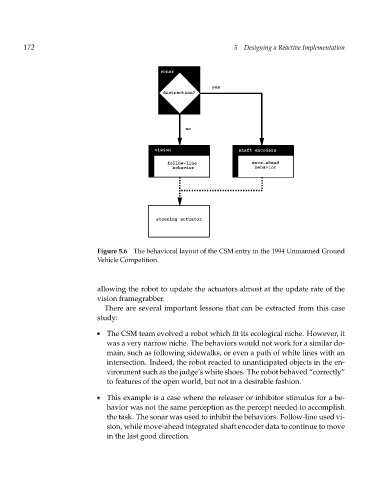
Figure 5.6 The behavioral layout of the CSM entry in the 1994 Unmanned Ground
Vehicle Competition.
allowing the robot to update the actuators almost at the update rate of the
vision framegrabber.
There are several important lessons that can be extracted from this case
study:
The CSM team evolved a robot which fit its ecological niche. However, it
was a very narrow niche. The behaviors would not work for a similar do-
main, such as following sidewalks, or even a path of white lines with an
intersection. Indeed, the robot reacted to unanticipated objects in the en-
vironment such as the judge’s white shoes. The robot behaved “correctly”
to features of the open world, but not in a desirable fashion.
This example is a case where the releaser or inhibitor stimulus for a be-
havior was not the same perception as the percept needed to accomplish
the task. The sonar was used to inhibit the behaviors. Follow-line used vi-
sion, while move-ahead integrated shaft encoder data to continue to move
in the last good direction.