
Page 214 - Introduction to AI Robotics
P. 214
6.1 Overview
Robot 197
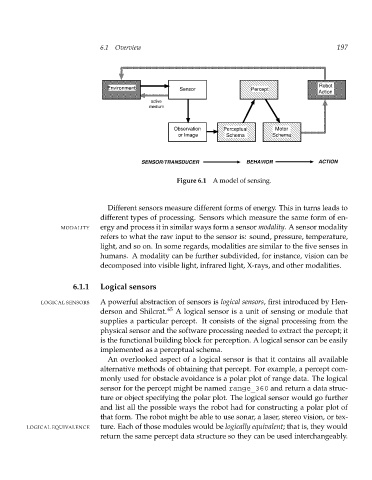
Environment Sensor Percept
Action
active
medium
Observation Perceptual Motor
or Image Schema Schema
SENSOR/TRANSDUCER BEHAVIOR ACTION
Figure 6.1 A model of sensing.
Different sensors measure different forms of energy. This in turns leads to
different types of processing. Sensors which measure the same form of en-
MODALITY ergy and process it in similar ways form a sensor modality. A sensor modality
refers to what the raw input to the sensor is: sound, pressure, temperature,
light, and so on. In some regards, modalities are similar to the five senses in
humans. A modality can be further subdivided, for instance, vision can be
decomposed into visible light, infrared light, X-rays, and other modalities.
6.1.1 Logical sensors
LOGICAL SENSORS A powerful abstraction of sensors is logical sensors, first introduced by Hen-
derson and Shilcrat. 65 A logical sensor is a unit of sensing or module that
supplies a particular percept. It consists of the signal processing from the
physical sensor and the software processing needed to extract the percept; it
is the functional building block for perception. A logical sensor can be easily
implemented as a perceptual schema.
An overlooked aspect of a logical sensor is that it contains all available
alternative methods of obtaining that percept. For example, a percept com-
monly used for obstacle avoidance is a polar plot of range data. The logical
sensor for the percept might be named range_360 and return a data struc-
ture or object specifying the polar plot. The logical sensor would go further
and list all the possible ways the robot had for constructing a polar plot of
that form. The robot might be able to use sonar, a laser, stereo vision, or tex-
LOGICAL EQUIVALENCE ture. Each of those modules would be logically equivalent; that is, they would
return the same percept data structure so they can be used interchangeably.