
Page 230 - Introduction to AI Robotics
P. 230
6.5 Proximity Sensors
R 213
β
III
I
IV II
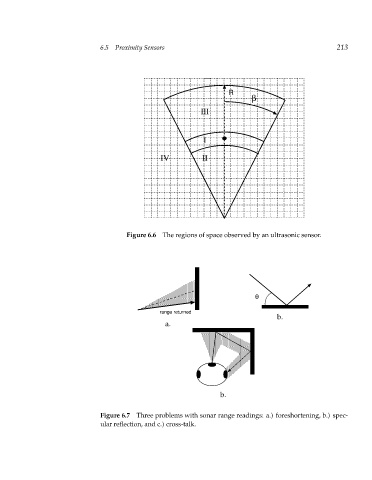
Figure 6.6 The regions of space observed by an ultrasonic sensor.
θ
range returned
b.
a.
b.
Figure 6.7 Three problems with sonar range readings: a.) foreshortening, b.) spec-
ular reflection, and c.) cross-talk.