
Page 25 - Introduction to AI Robotics
P. 25
8
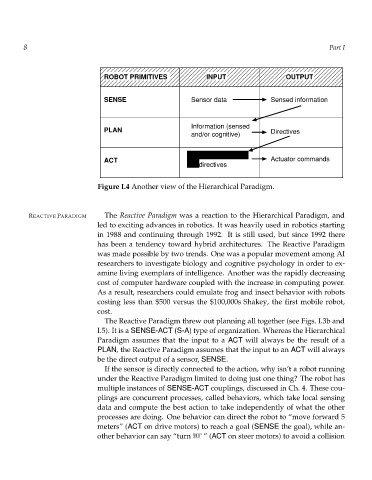
ROBOT PRIMITIVES INPUT OUTPUT Part I
SENSE Sensor data Sensed information
Information (sensed
PLAN Directives
and/or cognitive)
Sensed information
ACT Actuator commands
or directives
Figure I.4 Another view of the Hierarchical Paradigm.
REACTIVE PARADIGM The Reactive Paradigm was a reaction to the Hierarchical Paradigm, and
led to exciting advances in robotics. It was heavily used in robotics starting
in 1988 and continuing through 1992. It is still used, but since 1992 there
has been a tendency toward hybrid architectures. The Reactive Paradigm
was made possible by two trends. One was a popular movement among AI
researchers to investigate biology and cognitive psychology in order to ex-
amine living exemplars of intelligence. Another was the rapidly decreasing
cost of computer hardware coupled with the increase in computing power.
As a result, researchers could emulate frog and insect behavior with robots
costing less than $500 versus the $100,000s Shakey, the first mobile robot,
cost.
The Reactive Paradigm threw out planning all together (see Figs. I.3b and
I.5). It is a SENSE-ACT (S-A) type of organization. Whereas the Hierarchical
Paradigm assumes that the input to a ACT will always be the result of a
PLAN, the Reactive Paradigm assumes that the input to an ACT will always
be the direct output of a sensor, SENSE.
If the sensor is directly connected to the action, why isn’t a robot running
under the Reactive Paradigm limited to doing just one thing? The robot has
multiple instances of SENSE-ACT couplings, discussed in Ch. 4. These cou-
plings are concurrent processes, called behaviors, which take local sensing
data and compute the best action to take independently of what the other
processes are doing. One behavior can direct the robot to “move forward 5
meters” (ACT on drive motors) to reach a goal (SENSE the goal), while an-
other behavior can say “turn 90 ”(ACT on steer motors) to avoid a collision