
Page 26 - Introduction to AI Robotics
P. 26
Part I
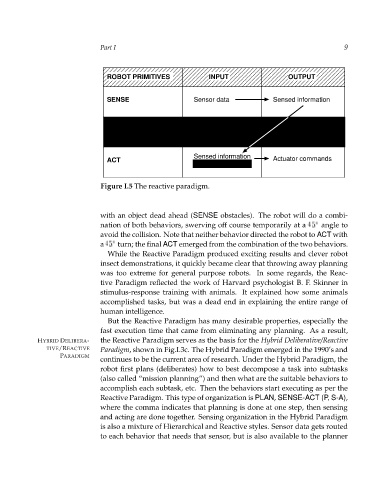
ROBOT PRIMITIVES INPUT OUTPUT 9
SENSE Sensor data Sensed information
Information (sensed
PLAN Directives
and/or cognitive)
Sensed information
ACT Actuator commands
or directives
Figure I.5 The reactive paradigm.
with an object dead ahead (SENSE obstacles). The robot will do a combi-
nation of both behaviors, swerving off course temporarily at a 45 angle to
avoid the collision. Note that neither behavior directed the robot to ACT with
a 45 turn; the final ACT emerged from the combination of the two behaviors.
While the Reactive Paradigm produced exciting results and clever robot
insect demonstrations, it quickly became clear that throwing away planning
was too extreme for general purpose robots. In some regards, the Reac-
tive Paradigm reflected the work of Harvard psychologist B. F. Skinner in
stimulus-response training with animals. It explained how some animals
accomplished tasks, but was a dead end in explaining the entire range of
human intelligence.
But the Reactive Paradigm has many desirable properties, especially the
fast execution time that came from eliminating any planning. As a result,
HYBRID DELIBERA- the Reactive Paradigm serves as the basis for the Hybrid Deliberative/Reactive
TIVE/REACTIVE Paradigm, shown in Fig.I.3c. The Hybrid Paradigm emerged in the 1990’s and
PARADIGM
continues to be the current area of research. Under the Hybrid Paradigm, the
robot first plans (deliberates) how to best decompose a task into subtasks
(also called “mission planning”) and then what are the suitable behaviors to
accomplish each subtask, etc. Then the behaviors start executing as per the
Reactive Paradigm. This type of organization is PLAN, SENSE-ACT (P, S-A),
where the comma indicates that planning is done at one step, then sensing
and acting are done together. Sensing organization in the Hybrid Paradigm
is also a mixture of Hierarchical and Reactive styles. Sensor data gets routed
to each behavior that needs that sensor, but is also available to the planner