
Page 277 - Introduction to AI Robotics
P. 277
260
7
The Hybrid Deliberative/Reactive Paradigm
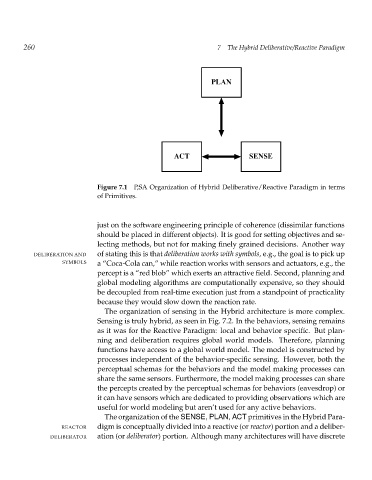
PLAN
ACT SENSE
Figure 7.1 P,SA Organization of Hybrid Deliberative/Reactive Paradigm in terms
of Primitives.
just on the software engineering principle of coherence (dissimilar functions
should be placed in different objects). It is good for setting objectives and se-
lecting methods, but not for making finely grained decisions. Another way
DELIBERATION AND of stating this is that deliberation works with symbols, e.g., the goal is to pick up
SYMBOLS a “Coca-Cola can,” while reaction works with sensors and actuators, e.g., the
percept is a “red blob” which exerts an attractive field. Second, planning and
global modeling algorithms are computationally expensive, so they should
be decoupled from real-time execution just from a standpoint of practicality
because they would slow down the reaction rate.
The organization of sensing in the Hybrid architecture is more complex.
Sensing is truly hybrid, as seen in Fig. 7.2. In the behaviors, sensing remains
as it was for the Reactive Paradigm: local and behavior specific. But plan-
ning and deliberation requires global world models. Therefore, planning
functions have access to a global world model. The model is constructed by
processes independent of the behavior-specific sensing. However, both the
perceptual schemas for the behaviors and the model making processes can
share the same sensors. Furthermore, the model making processes can share
the percepts created by the perceptual schemas for behaviors (eavesdrop) or
it can have sensors which are dedicated to providing observations which are
useful for world modeling but aren’t used for any active behaviors.
The organization of the SENSE, PLAN, ACT primitives in the Hybrid Para-
REACTOR digm is conceptually divided into a reactive (or reactor) portion and a deliber-
DELIBERATOR ation (or deliberator) portion. Although many architectures will have discrete