
Page 278 - Introduction to AI Robotics
P. 278
7.2 Attributes of the Hybrid Paradigm
World Map/ 261
Knowledge Rep
virtual sensor
Behavior
Behavior
Behavior
Sensor 3 Sensor 1 Sensor 2
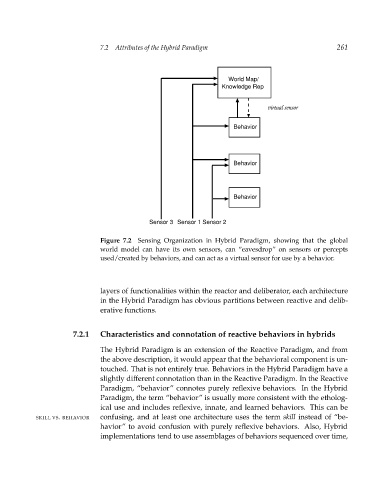
Figure 7.2 Sensing Organization in Hybrid Paradigm, showing that the global
world model can have its own sensors, can “eavesdrop” on sensors or percepts
used/created by behaviors, and can act as a virtual sensor for use by a behavior.
layers of functionalities within the reactor and deliberator, each architecture
in the Hybrid Paradigm has obvious partitions between reactive and delib-
erative functions.
7.2.1 Characteristics and connotation of reactive behaviors in hybrids
The Hybrid Paradigm is an extension of the Reactive Paradigm, and from
the above description, it would appear that the behavioral component is un-
touched. That is not entirely true. Behaviors in the Hybrid Paradigm have a
slightly different connotation than in the Reactive Paradigm. In the Reactive
Paradigm, “behavior” connotes purely reflexive behaviors. In the Hybrid
Paradigm, the term “behavior” is usually more consistent with the etholog-
ical use and includes reflexive, innate, and learned behaviors. This can be
SKILL VS. BEHAVIOR confusing, and at least one architecture uses the term skill instead of “be-
havior” to avoid confusion with purely reflexive behaviors. Also, Hybrid
implementations tend to use assemblages of behaviors sequenced over time,