
Page 283 - Introduction to AI Robotics
P. 283
266
7
Mission Planner, The Hybrid Deliberative/Reactive Paradigm
Sequencer,
Performance Monitoring Agent
Cartographer
Planner
mission planner
Cartographer navigator
pilot
Deliberative Layer
Homeostatic
Control
Reactive Layer
Behavioral Manager
Sensor Motor
motor schema manager
ps1 ms1
Σ actuators
ps2 ms2
ps3 ms3
sensors
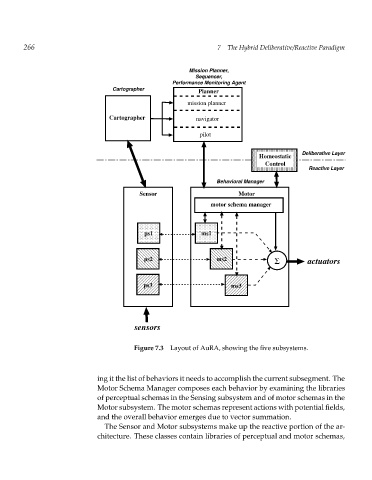
Figure 7.3 Layout of AuRA, showing the five subsystems.
ing it the list of behaviors it needs to accomplish the current subsegment. The
Motor Schema Manager composes each behavior by examining the libraries
of perceptual schemas in the Sensing subsystem and of motor schemas in the
Motor subsystem. The motor schemas represent actions with potential fields,
and the overall behavior emerges due to vector summation.
The Sensor and Motor subsystems make up the reactive portion of the ar-
chitecture. These classes contain libraries of perceptual and motor schemas,