
Page 359 - Introduction to AI Robotics
P. 359
342
H11
H20 H8 H9 H10 9 Topological Path Planning
R7
H12
R4
H7 R5 H13
R6
H1
H2 H3 H4 H5 H6 F1 H14 H15
R1 R2 R3
H19 H18 F2 H17 H16
Navigating Door
Navigating Hall
N
R7 -> R2
R7 -H1-H2 -H5-R2
Moving from R7 to H1, going SOUTH
In navigating door behavior
ultra looking for door towards the: SOUTH
MOVE AHEAD MOTOR ACTIVE
Found door - Initialization terminated
MOVE THROUGH DOOR MOTOR ACTIVE
Moved through door - Nominal Behavior terminated
Moving from H1 to H2, going SOUTH
In navigating hall behavior
turning towards the: SOUTH
Turned towards hall - Initialization terminated
looking for hall towards the: EAST
HALL FOLLOW MOTOR ACTIVE
Found hall - Nominal Behavior terminated
Moving from H2 to H5, going EAST
In navigating hall behavior
turning towards the: EAST
Turned towards hall - Initialization terminated
vision looking for door relative: 90 (right side)
HALL FOLLOW MOTOR ACTIVE
Found door (vision) - Nominal Behavior terminated
Moving from H5 to R2, going SOUTH
In navigating door behavior
ultra looking for door towards the: SOUTH
following wall on left (right ground truth)
WALL FOLLOW MOTOR ACTIVE
Found door - Initialization terminated
MOVE THROUGH DOOR MOTOR ACTIVE
Moved through door - Nominal Behavior terminated
Goal location reached!
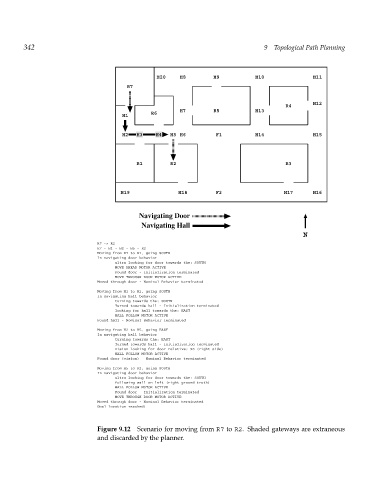
Figure 9.12 Scenario for moving from R7 to R2. Shaded gateways are extraneous
and discarded by the planner.