
Page 216 - Introduction to Autonomous Mobile Robots
P. 216
Mobile Robot Localization
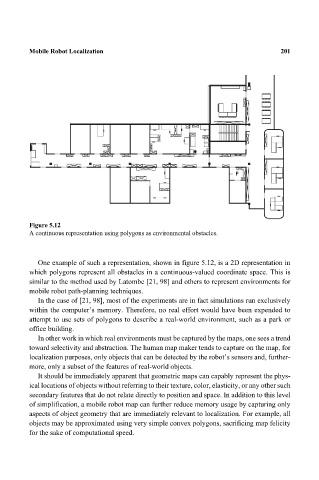
Figure 5.12 201
A continuous representation using polygons as environmental obstacles.
One example of such a representation, shown in figure 5.12, is a 2D representation in
which polygons represent all obstacles in a continuous-valued coordinate space. This is
similar to the method used by Latombe [21, 98] and others to represent environments for
mobile robot path-planning techniques.
In the case of [21, 98], most of the experiments are in fact simulations run exclusively
within the computer’s memory. Therefore, no real effort would have been expended to
attempt to use sets of polygons to describe a real-world environment, such as a park or
office building.
In other work in which real environments must be captured by the maps, one sees a trend
toward selectivity and abstraction. The human map maker tends to capture on the map, for
localization purposes, only objects that can be detected by the robot’s sensors and, further-
more, only a subset of the features of real-world objects.
It should be immediately apparent that geometric maps can capably represent the phys-
ical locations of objects without referring to their texture, color, elasticity, or any other such
secondary features that do not relate directly to position and space. In addition to this level
of simplification, a mobile robot map can further reduce memory usage by capturing only
aspects of object geometry that are immediately relevant to localization. For example, all
objects may be approximated using very simple convex polygons, sacrificing map felicity
for the sake of computational speed.