
Page 217 - Introduction to Autonomous Mobile Robots
P. 217
202
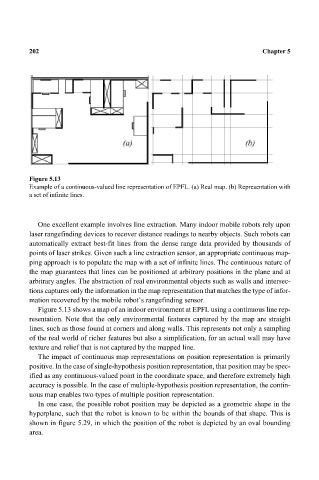
Figure 5.13 Chapter 5
Example of a continuous-valued line representation of EPFL. (a) Real map. (b) Representation with
a set of infinite lines.
One excellent example involves line extraction. Many indoor mobile robots rely upon
laser rangefinding devices to recover distance readings to nearby objects. Such robots can
automatically extract best-fit lines from the dense range data provided by thousands of
points of laser strikes. Given such a line extraction sensor, an appropriate continuous map-
ping approach is to populate the map with a set of infinite lines. The continuous nature of
the map guarantees that lines can be positioned at arbitrary positions in the plane and at
arbitrary angles. The abstraction of real environmental objects such as walls and intersec-
tions captures only the information in the map representation that matches the type of infor-
mation recovered by the mobile robot’s rangefinding sensor.
Figure 5.13 shows a map of an indoor environment at EPFL using a continuous line rep-
resentation. Note that the only environmental features captured by the map are straight
lines, such as those found at corners and along walls. This represents not only a sampling
of the real world of richer features but also a simplification, for an actual wall may have
texture and relief that is not captured by the mapped line.
The impact of continuous map representations on position representation is primarily
positive. In the case of single-hypothesis position representation, that position may be spec-
ified as any continuous-valued point in the coordinate space, and therefore extremely high
accuracy is possible. In the case of multiple-hypothesis position representation, the contin-
uous map enables two types of multiple position representation.
In one case, the possible robot position may be depicted as a geometric shape in the
hyperplane, such that the robot is known to be within the bounds of that shape. This is
shown in figure 5.29, in which the position of the robot is depicted by an oval bounding
area.