
Page 298 - LEGO MINDSTORMS - Robotics Invention System-2 Projects
P. 298
Robot 9 • The SpinnerBot
Final Step 20
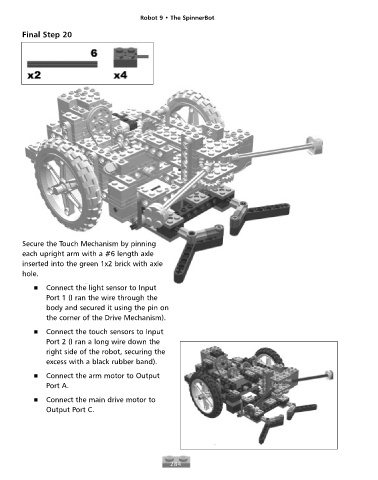
Secure the Touch Mechanism by pinning
each upright arm with a #6 length axle
inserted into the green 1x2 brick with axle
hole.
Connect the light sensor to Input
Port 1 (I ran the wire through the
body and secured it using the pin on
the corner of the Drive Mechanism).
Connect the touch sensors to Input
Port 2 (I ran a long wire down the
right side of the robot, securing the
excess with a black rubber band).
Connect the arm motor to Output
Port A.
Connect the main drive motor to
Output Port C.
284