
Page 74 - Making PIC Microcontroller Instruments and Controllers
P. 74
6' CO TNOLl|ilG IHE OUTPUT AIID BEADING THE II{PUT
Servo Position Control tor an Fi/C servo trom PORTB butlons
(This program uses a servo on Jumpet J7) lcontinued)
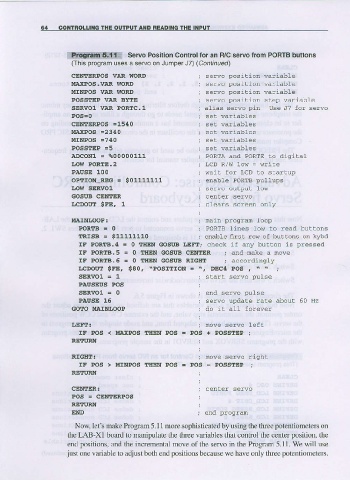
CENTERPOS VAR IIORD : s- o por io /d- abl-
MAXPOS.VAR WORD : s6 o pos io d- abl-
MMPOS 1IAR WORD : s- o pos io d abl-
POSSTEP l/AR BYTE r servo position step variable
SERVOI vAR PORTC.I ; alias servo pln Use.l? for sedo
POS=o r set variables
CENaERPOS -1540 r set variables
MAXPOS =23{0 ; set varialrles
MTNPOS =740 ; set varialrles
POSSEEP =5 ; set varialrles
AICOIiI1 = %00000111 ; PoRTA and PoRTE Lo diqital
LOW PORIE.2 r LcD R/W Los = write
PAUSE 100 ; wait for LcD to startup
OPTIOII_REG = $01111111 ; enable PORTB pullups
I,oW SERVO1 ; servo output Lon
GOSUB CENTER ; center seno
LCDOI'I $FE, L j clears screen only
UAINIOOP ! ; nain progf,d toop
PORIB = 0 PoRTB lines low to read butrons
ERISB = 511111110 ; enable first low of buttons on kybd
IF POREB.4 = 0 IHEN GOSttB I,EFE; check if any button is pressed
IF POR'B.5 - 0 ltlEN GOSttB CENTER ; and make a nove
IF PORIB.6 = 0 IIIEN GOSttB RIGHT ; accordinqly
LDOUT $Fa. $80, 'POSIIION = \, DEC4 POg r \ \ ;
SERVO1 = 1 ; siart seflopulse
PAUSaUS POS
SERVO1 = 0 ; end selvopulse
PAUSE 15 ; selvo update rare about 60 Hz
GOIO llAtllt OOP ; do it all folever
LEFI: ; move selvo left
IF POS < llAXPOg rgEN POS = POS + POSSBEP ;
RET('RN
RIGSI: ; nove servo right
IF POS > IIINPOS EIIEN POS = POS - POSSIEP ;
BETT'RN
CENTERT ; cenler servo
POS = CEMfERPOS
RE