
Page 149 - Mechatronic Systems Modelling and Simulation with HDLs
P. 149
138 7 MECHATRONICS
C- oder Assembler-Programm:
RESET: Data 8
dw START
org $1000 Memory Adr CPU
START:
clra 16
sta DATA
sta STATE
sta IOPORT
LOOP:
jsr CALC RWb
bra LOOP Clk
end
... PIO
Control
Input
Output
Timer ADC DAC
Car body
acceleration
Desired
damping
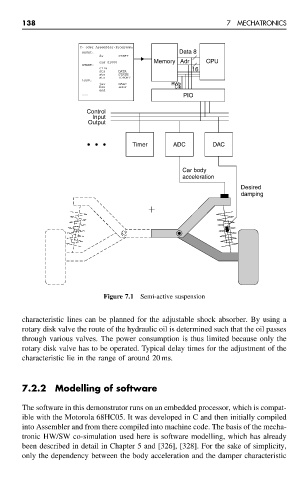
Figure 7.1 Semi-active suspension
characteristic lines can be planned for the adjustable shock absorber. By using a
rotary disk valve the route of the hydraulic oil is determined such that the oil passes
through various valves. The power consumption is thus limited because only the
rotary disk valve has to be operated. Typical delay times for the adjustment of the
characteristic lie in the range of around 20 ms.
7.2.2 Modelling of software
The software in this demonstrator runs on an embedded processor, which is compat-
ible with the Motorola 68HC05. It was developed in C and then initially compiled
into Assembler and from there compiled into machine code. The basis of the mecha-
tronic HW/SW co-simulation used here is software modelling, which has already
been described in detail in Chapter 5 and [326], [328]. For the sake of simplicity,
only the dependency between the body acceleration and the damper characteristic