
Page 153 - Mechatronic Systems Modelling and Simulation with HDLs
P. 153
142 7 MECHATRONICS
is still no difference, because the change-over to hard damping has not yet taken
place. Then we see clear differences. If the change-over does not take place, then
the spring compression goes positive, which means that the car rises off the springs
and thus the wheel loading falls. This leads to the safety problems discussed above.
When the damper characteristic is changed over, the spring compression exhibits
a significantly more desirable behaviour.
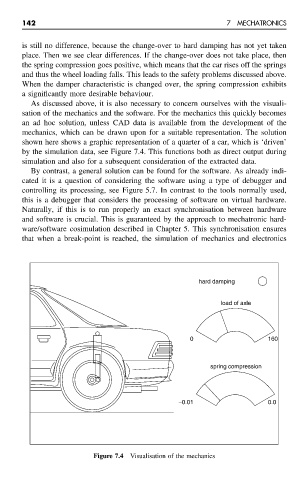
As discussed above, it is also necessary to concern ourselves with the visuali-
sation of the mechanics and the software. For the mechanics this quickly becomes
an ad hoc solution, unless CAD data is available from the development of the
mechanics, which can be drawn upon for a suitable representation. The solution
shown here shows a graphic representation of a quarter of a car, which is ‘driven’
by the simulation data, see Figure 7.4. This functions both as direct output during
simulation and also for a subsequent consideration of the extracted data.
By contrast, a general solution can be found for the software. As already indi-
cated it is a question of considering the software using a type of debugger and
controlling its processing, see Figure 5.7. In contrast to the tools normally used,
this is a debugger that considers the processing of software on virtual hardware.
Naturally, if this is to run properly an exact synchronisation between hardware
and software is crucial. This is guaranteed by the approach to mechatronic hard-
ware/software cosimulation described in Chapter 5. This synchronisation ensures
that when a break-point is reached, the simulation of mechanics and electronics
hard damping
load of axle
0 160
spring compression
−0.01 0.0
Figure 7.4 Visualisation of the mechanics